株式会社カナデンが提供する製品やソリューションをご紹介
ロボットに、「人間のような指先の触覚」を。
高密度3軸触覚センサ
『uSkin』
『uSkin』は、薄く、柔らかく、耐久性のあるカバーと最小限の配線で構成されている高密度3軸触覚センサです。
この製品(uSkin)は、XELA ROBOTICS株式会社が製造しています。

SOLUTION
そのお悩み、『uSkin』が解決します。

『uSkin』は、ロボットに人間のような指先の触覚を提供するために開発された高密度3軸触覚センサです。
薄く、柔らかく、耐久性のあるカバーと最小限の配線で構成されており、ロボットハンドやグリッパーに装着することで、まるで人間の指先のような繊細な力の検知を可能にします。
これまで自動化が困難だった複雑な作業も、『uSkin』が持つ高度な触覚センシング技術で実現します。
REASONS TO CHOOSE
『uSkin』が選ばれる3つの理由
理由 | 01 |
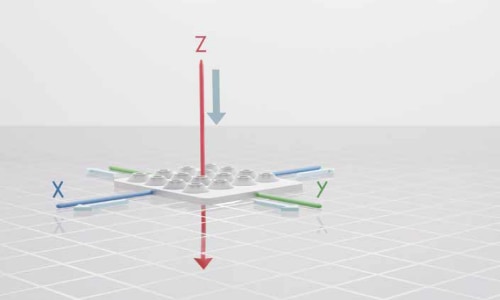
高密度な「3軸力」測定で、”触”をデータ化
『uSkin』のセンサモジュールは複数のセンサ(タクセル)を搭載しており、それぞれが垂直方向の圧力だけでなく、水平方向のせん断力(ズレる力)も測定可能です。
これにより、物体の滑りや傾きといった微細な変化を正確に捉え、人間のような巧みな物体操作を可能にします。

理由 | 02 |
薄く、柔らかく、そして高い「耐久性」
『uSkin』は、壊れやすい物体を損傷させることなく扱えるソフトセンサーです。
様々な大きさ・形状・硬度の物体を安全に操作できる柔軟性に加え、センサーのオーバーロードにも耐えうる高い耐久性を備えています。
理由 | 03 |
「デジタル出力」で、最小限の配線
多くのセンサが必要とする複雑なケーブルや大型の変換器は不要です。『uSkin』はデフォルトでデジタル出力に対応しており、数本の細いワイヤだけで測定値を収集できます。
デイジーチェーン(数珠繋ぎ)方式の配線の為、ロボットハンドにセンシングポイントが368個あっても、接続配線は2本となります。
これにより、電気的ノイズの影響を最小限に抑え、高速かつ正確なデータを提供するとともに、ロボットへの実装も容易にします。

USE CASES
『uSkin』の活用シーン

製造業:小型部品の組み立て
荷重校正されたセンサと磁気干渉補正機能により、これまで人手に頼っていた精密な組み立て作業の自動化を実現します。

物流:倉庫でのピッキング
物体の重量や硬さを検知し、最適な力でピッキング。物体の落下や破損を防ぎ、効率的な倉庫運用に貢献します。

農業:デリケートな果物の収穫
果物の熟れ具合を触覚で判断し、傷つけることなく収穫。収穫量の増加と廃棄ロスの削減が期待できます。
DEMO VIDEO
『uSkin』のデモ動画
SENSOR COLLECTION
多彩なセンサラインアップ
パッチセンサモジュール (uSPa) | 5つの形状・大きさから成るフラットセンサーシリーズ。様々な平面への取り付けに最適です。 |
|---|---|
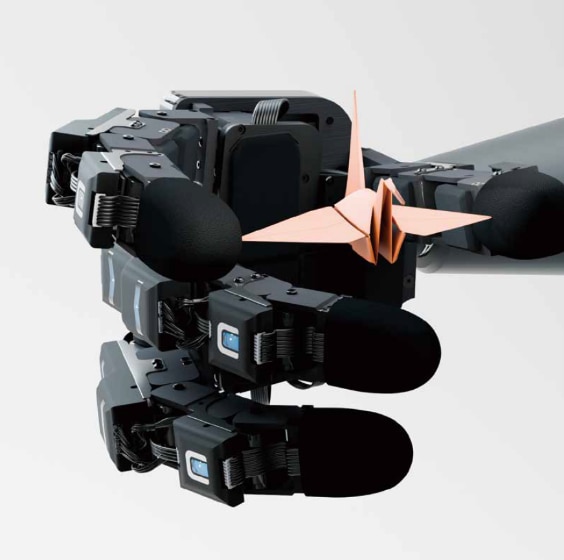
カーブドセンサモジュール (uSCu) | ロボットハンドの指先のような湾曲した面のために特別に開発されたモデルです。 |
プロテクトセンサモジュール (uSPr) | グリッパー用に設計された密閉保護タイプ。過酷な環境でも安心して使用できます。 |
マルチベンドセンサモジュール (uSMu) | センシングポイント(タクセル)間での湾曲・切断が可能。円柱や複雑な曲面にも柔軟に対応します。 |
各センサモジュールの詳細な仕様や製品画像は、カタログにてご確認いただけます。
CUSTOM MODELS
カスタムモデル

ヒューマノイドロボット向けカスタムフィンガー
標準的なセンサーモデルに加え、お客様独自の要件や具体的なニーズに合わせて最適にカスタマイズするサービスも提供しております。
CONTACT US
カタログダウンロード・お問い合わせ
製品の詳細なスペックや、お客様の課題に合わせたご提案をさせていただきます。
お気軽にお問い合わせください。

© 2021 KANADEN CORPORATION.